Statistical TDA
Doing inference with persistence diagrams — from stability guarantees to hypothesis testing
Overview & Motivation
The previous topics in this track gave us the machinery to compute topological summaries of data: we built simplicial complexes from point clouds, computed persistent homology to track features across scales, measured distances between persistence diagrams via the bottleneck distance, and used the Mapper algorithm to produce interpretable graph summaries of high-dimensional datasets.
But a fundamental question remains: how do we know which topological features are real?
Persistent homology applied to a finite sample produces a persistence diagram . This diagram is a random object — draw a different sample from the same distribution, and you get a different diagram. Some bars in the barcode represent genuine topological features of the underlying space; others are sampling noise. Statistical TDA gives us the tools to tell them apart.
We develop four pillars:
- Stability & Convergence — the theoretical foundation: persistence diagrams are stable under perturbations, and empirical diagrams converge to the true diagram as .
- Confidence Sets via Bootstrap — constructing confidence bands around persistence diagrams to determine which features are statistically significant.
- Vectorization — mapping persistence diagrams into Banach and Hilbert spaces (persistence landscapes, persistence images) where standard statistical tools apply.
- Hypothesis Testing — permutation tests and two-sample tests on topological summaries.
1. Stability & Convergence
The Stability Theorem
The Stability Theorem is the theoretical bedrock of statistical TDA. It says that small perturbations of the input data produce small changes in the persistence diagram — making persistence a robust summary.
Theorem 1 (Stability (Cohen-Steiner, Edelsbrunner, Harer, 2007)).
Let be tame functions on a topological space . Then:
where is the bottleneck distance between persistence diagrams.
For Vietoris-Rips filtrations built from point clouds, the stability theorem translates to:
Corollary 1 (Vietoris-Rips Stability).
Let be finite point clouds. Then:
where is the Hausdorff distance.
This means: if two point clouds are close in Hausdorff distance, their persistence diagrams are close in bottleneck distance. The topological summary is Lipschitz-continuous with respect to the input.
Why Stability Matters for Statistics
Stability is what makes TDA amenable to statistical reasoning. Without it, we could not:
- Talk about convergence of empirical diagrams to a population diagram
- Construct confidence intervals
- Perform hypothesis tests
It tells us that persistence diagrams live in a well-behaved metric space, not some wild combinatorial object that could change arbitrarily under small perturbations.
Demonstration: Stability Under Perturbation
We sample 100 points from a unit circle with light noise, then add increasing amounts of Gaussian perturbation. The bottleneck distance between the original and perturbed diagrams grows proportionally to the perturbation magnitude — exactly as the Stability Theorem predicts.
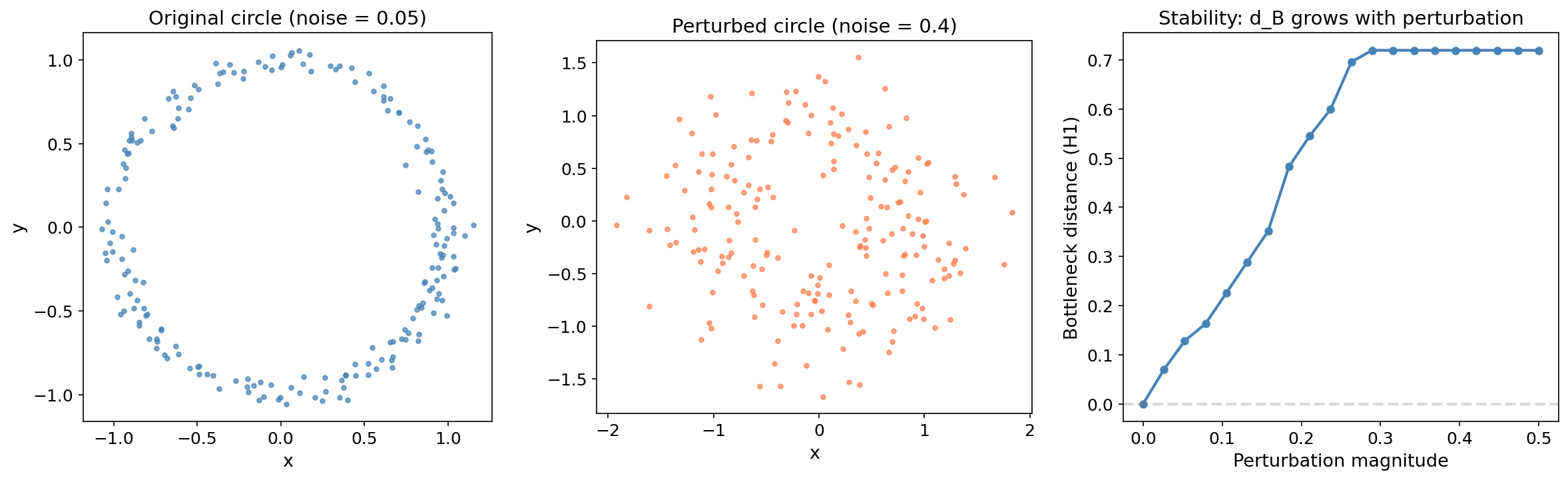
The near-linear growth of with perturbation magnitude is the Lipschitz bound in action. The slope is bounded by the constant in the corollary — twice the Hausdorff distance between the original and perturbed point clouds.
Try it yourself — drag the slider to perturb the circle and watch the bottleneck distance respond:
Bottleneck distance dB = 0.105
Convergence of Empirical Persistence Diagrams
The Stability Theorem gives us a deterministic bound. To do statistics, we need a probabilistic statement: as the sample size , the empirical persistence diagram converges to the true diagram of the underlying distribution.
Theorem 2 (Convergence Rate (Chazal & Oudot, 2008)).
Let be a probability measure on a compact subset of , and let be an i.i.d. sample of size from . Then:
with high probability. The rate depends on the ambient dimension — the curse of dimensionality appears even in topological inference.
This convergence result justifies treating persistence diagrams as statistical estimators. The empirical diagram is a consistent estimator of the population diagram, and the convergence rate tells us how many samples we need for a given accuracy.
Lemma 1 (Hausdorff Convergence Rate).
Let be a probability measure supported on a compact set with reach and let be an i.i.d. sample of size from . Then there exists a constant depending on such that:
In particular, with high probability.
Proof.
The proof combines a covering argument with the union bound. Cover with balls of radius , where by compactness (the -covering number of a -dimensional set). The probability that any ball in the cover fails to contain a sample point is at most . Setting balances the exponential decay against the covering number growth, yielding the claimed rate. The persistence convergence (Theorem 2) then follows by combining this Hausdorff bound with the VR stability corollary: .
∎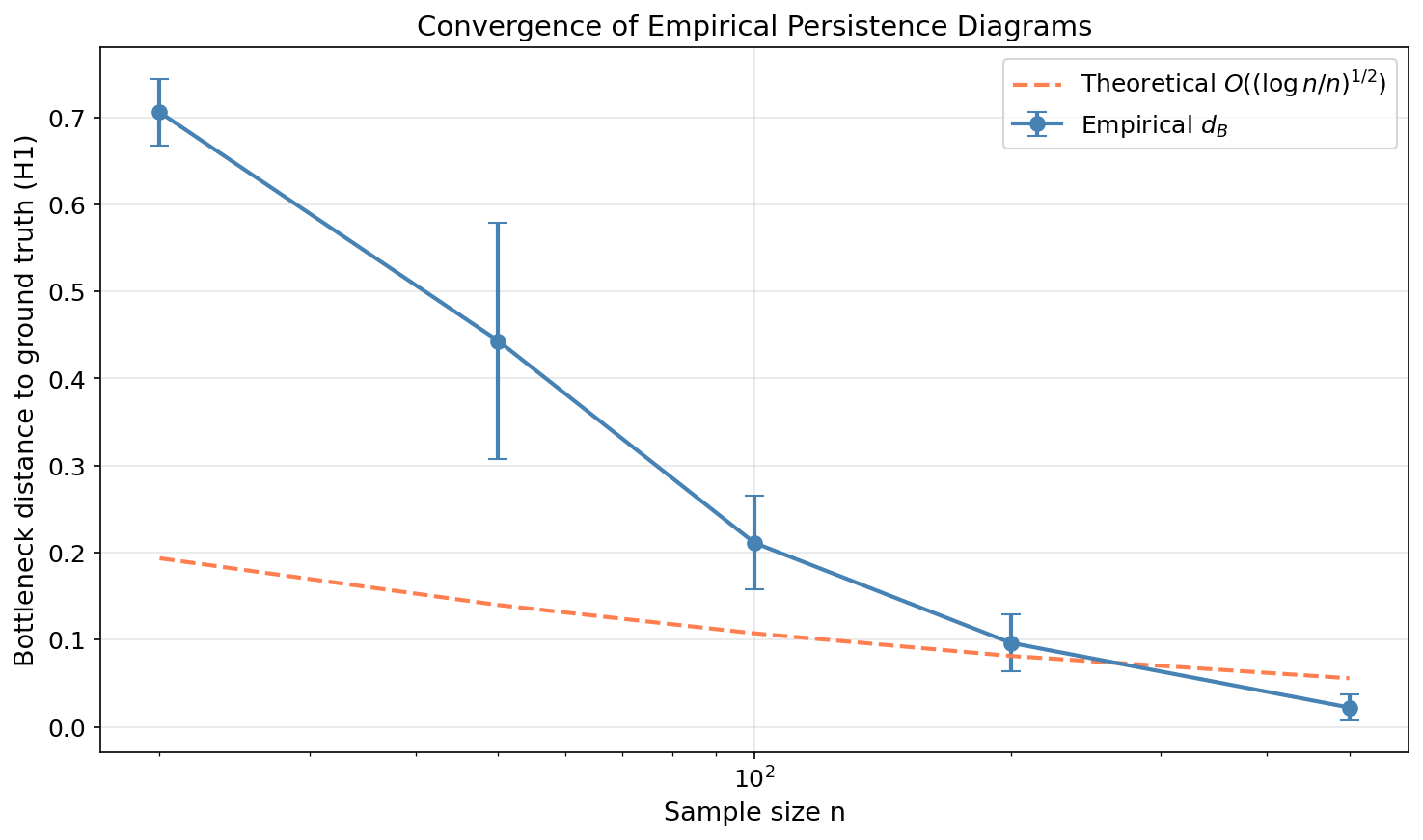
The empirical convergence (blue points with error bars) closely tracks the theoretical rate (dashed coral line) for data in . With 500 samples, the bottleneck distance to the ground truth drops below 0.05.
2. Confidence Sets for Persistence Diagrams
The Problem
Given a persistence diagram from a finite sample, which features are statistically significant and which are noise?
A bar in the barcode with a large persistence is intuitively “more real” than a short bar. But how large is large enough? We need a formal threshold — a confidence set that separates signal from noise.
The Bootstrap Approach
The key idea from Fasy, Lecci, Rinaldo, Wasserman, et al. (2014) is elegant:
Definition 1 (Bootstrap Confidence Band).
Given a point cloud and significance level :
- Compute the persistence diagram .
- Draw bootstrap samples from (sampling with replacement).
- Compute the persistence diagram for each bootstrap sample: .
- Compute the bottleneck distance between each bootstrap diagram and the original: .
- The -confidence threshold is .
The confidence band is the strip of width above the diagonal:
Points outside this band are statistically significant at level . Points inside are not distinguishable from noise.
The intuition: the bootstrap samples are perturbations of the original data. The distances measure how much the persistence diagram “wobbles” under resampling. Features whose persistence exceeds this wobble are stable — they would appear in most samples from the population.
Theorem 4 (Bootstrap Validity (Fasy, Lecci, Rinaldo, Wasserman et al., 2014)).
Under mild regularity conditions on the underlying distribution , the bootstrap confidence band has asymptotically correct coverage:
where is the -quantile of the bootstrap bottleneck distances.
Proof.
The proof uses the triangle inequality on the bottleneck distance. For a bootstrap sample drawn from the empirical distribution :
The Hausdorff convergence (Lemma 1) ensures that , so the empirical distribution concentrates on . The bootstrap consistently estimates the distribution of because the map from point clouds to persistence diagrams is Lipschitz (by the Stability Theorem), and the bootstrap consistently estimates the distribution of Lipschitz functionals of the empirical measure (by standard bootstrap consistency theory). The quantile therefore converges to the true -quantile of .
∎Remark.
The bootstrap is computationally expensive — each of the bootstrap samples requires recomputing persistent homology, which costs to depending on the algorithm. However, the bootstrap samples are independent, making the procedure embarrassingly parallel. With and on a modern multicore machine, the entire confidence band computation takes seconds.
Example: Circle with Noise
We apply the bootstrap to 300 points sampled from a noisy circle with bootstrap resamples. The diagram should show one significant point (the loop) well above the confidence band, with everything else falling inside (noise).
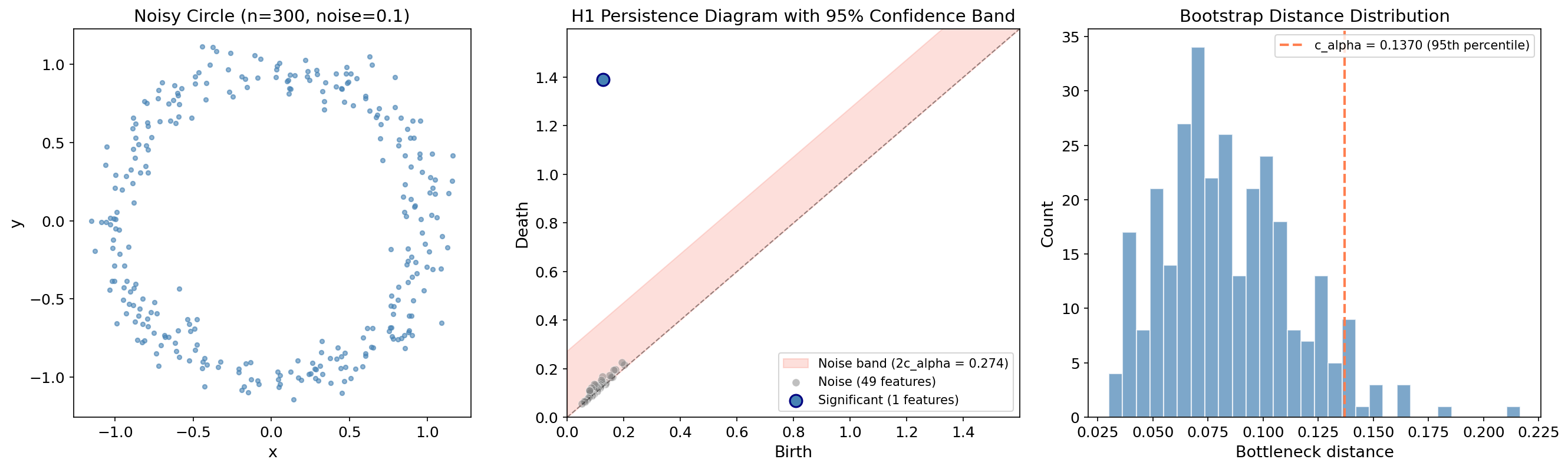
The single large blue point represents the circle’s loop — its persistence of far exceeds the significance threshold . The gray points cluster near the diagonal inside the salmon-colored noise band.
Adjust the confidence level to see how the band width and feature classification change:
cα = 0.060 | Significant features: 1 | Noise features: 8
def bootstrap_confidence_band(X, maxdim=1, n_bootstrap=100, alpha=0.05, seed=None):
"""
Compute a bootstrap confidence band for a persistence diagram.
Following Fasy, Lecci, Rinaldo, Wasserman et al. (2014):
1. Compute the persistence diagram of the original data.
2. Draw B bootstrap samples (with replacement) and compute their diagrams.
3. Compute bottleneck distances between each bootstrap diagram and the original.
4. The confidence threshold c_alpha is the (1-alpha) quantile.
Parameters
----------
X : ndarray of shape (n, d) — input point cloud
maxdim : int — maximum homology dimension
n_bootstrap : int — number of bootstrap resamples
alpha : float — significance level (e.g., 0.05 for 95% confidence)
seed : int or None — random seed
Returns
-------
dgms : list of ndarrays — persistence diagrams of the original data
c_alpha : float — the (1-alpha) quantile of bootstrap bottleneck distances
boot_dists : ndarray — bottleneck distances from each bootstrap resample
"""
rng = np.random.default_rng(seed)
n = len(X)
result = ripser(X, maxdim=maxdim)
dgms = result['dgms']
dgm_orig = dgms[maxdim][np.isfinite(dgms[maxdim][:, 1])]
boot_dists = np.zeros(n_bootstrap)
for b in range(n_bootstrap):
indices = rng.choice(n, size=n, replace=True)
dgm_boot = ripser(X[indices], maxdim=maxdim)['dgms'][maxdim]
dgm_boot = dgm_boot[np.isfinite(dgm_boot[:, 1])]
boot_dists[b] = bottleneck(dgm_orig, dgm_boot)
c_alpha = np.quantile(boot_dists, 1 - alpha)
return dgms, c_alpha, boot_dists3. Persistence Landscapes & Images
The Problem with Diagram Space
Persistence diagrams live in a metric space equipped with the bottleneck and Wasserstein distances, but this space is not a vector space. We cannot:
- Compute a mean persistence diagram (the Frechet mean exists but is NP-hard to compute exactly)
- Apply linear methods (PCA, regression, kernel SVMs with standard kernels)
- Perform standard statistical tests that assume a Hilbert or Banach space structure
Vectorization solves this by mapping persistence diagrams into function spaces where the full arsenal of statistics and machine learning applies.
Persistence Landscapes (Bubenik, 2015)
Definition 2 (Persistence Landscape).
Given a persistence diagram , define for each point the tent function:
This is a piecewise-linear function that rises from 0 at , peaks at with height , and returns to 0 at .
The -th persistence landscape is the -th largest value of the tent functions at each point:
where denotes the -th largest value.
Why are persistence landscapes so useful? They inherit all the structure we need for statistics:
Theorem 3 (Statistical Properties of Landscapes (Bubenik, 2015)).
Persistence landscapes satisfy:
- Banach space structure: Landscapes are elements of for .
- Strong law of large numbers: The sample mean landscape converges almost surely to the population mean landscape .
- Central limit theorem: .
- Stability: .
Properties (2) and (3) are what make landscapes a game-changer: we can compute means, variances, and confidence intervals using standard statistical tools — something impossible directly on persistence diagrams.
Proof.
(Stability, property 4.) Let and be persistence diagrams with . By the definition of bottleneck distance, there exists a matching with for all . Each tent function shifts by at most under this matching: for all , because the tent function peak shifts by at most in both birth and death. Since the -th largest of a set of numbers is a 1-Lipschitz function of the inputs, for all and . Taking the supremum gives .
∎Theorem 5 (Functional Central Limit Theorem for Landscapes).
Let be persistence diagrams of i.i.d. samples from a distribution . Then the mean landscape satisfies:
where is a Gaussian random element in with covariance structure inherited from the landscape space. This enables standard statistical tests: confidence bands, hypothesis tests, and regression on landscape features all follow from this CLT.
Persistence Kernels
An alternative to explicit vectorization is to define a kernel directly on persistence diagrams, enabling kernel methods (SVM, kernel PCA, Gaussian processes) without an intermediate vector representation.
Definition 5 (Persistence Scale-Space Kernel).
The persistence scale-space kernel between diagrams and is:
where is the reflection of across the diagonal. The subtraction ensures that points near the diagonal (noise) contribute little to the kernel value.
Persistence Kernel Demo
Interactive visualization coming soon — compare persistence diagrams using the scale-space kernel for SVM classification.
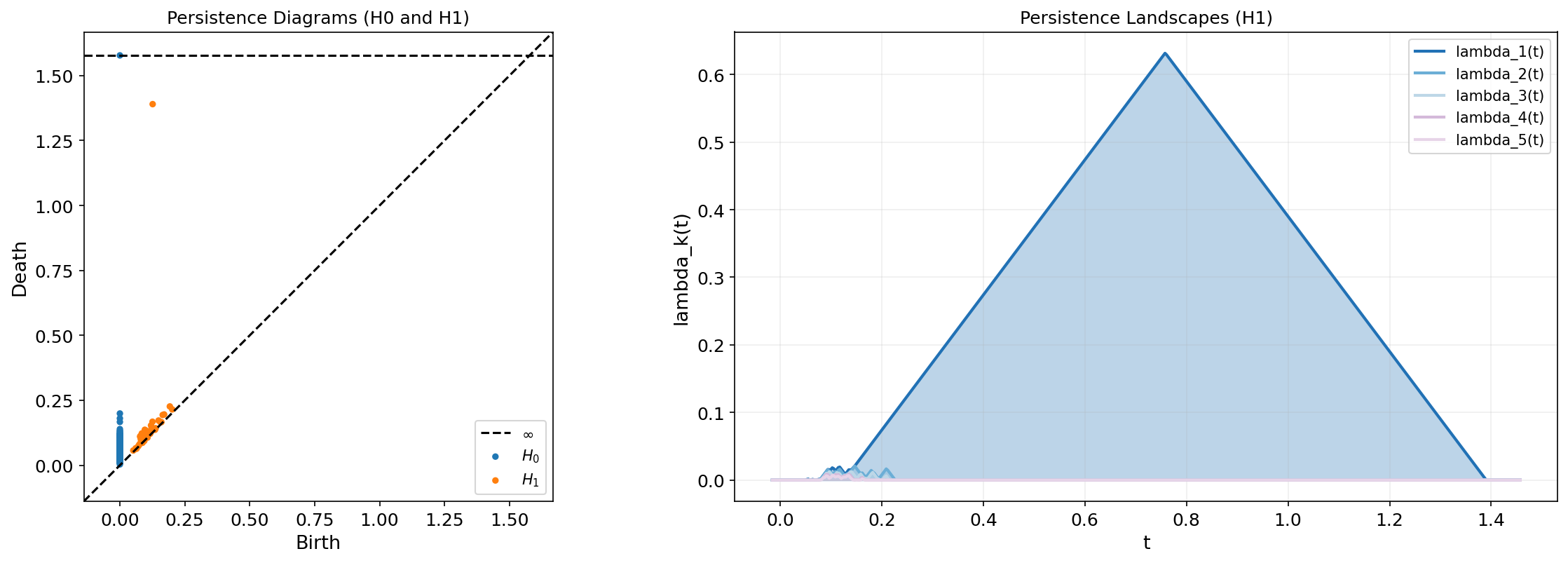
The dominant landscape (darkest blue) corresponds to the circle’s loop — the tent function with the tallest peak. The smaller landscapes through capture the noise features near the diagonal.
Toggle between the persistence diagram and its landscape representation:
def persistence_landscape(dgm, k_max=5, t_min=None, t_max=None, n_points=500):
"""
Compute persistence landscapes from a persistence diagram.
Parameters
----------
dgm : ndarray of shape (m, 2) — persistence diagram (birth, death)
k_max : int — number of landscape layers to compute
t_min, t_max : float — domain bounds (inferred if None)
n_points : int — number of evaluation points
Returns
-------
t : ndarray of shape (n_points,) — evaluation grid
landscapes : ndarray of shape (k_max, n_points) — landscape functions
"""
dgm = dgm[np.isfinite(dgm[:, 1])]
births, deaths = dgm[:, 0], dgm[:, 1]
if t_min is None:
t_min = births.min() - 0.05 * (deaths.max() - births.min())
if t_max is None:
t_max = deaths.max() + 0.05 * (deaths.max() - births.min())
t = np.linspace(t_min, t_max, n_points)
# Tent functions: Lambda_i(t) = max(0, min(t - b_i, d_i - t))
tent_values = np.zeros((len(dgm), n_points))
for i, (b, d) in enumerate(dgm):
tent_values[i] = np.maximum(0, np.minimum(t - b, d - t))
# k-th landscape = k-th largest tent value at each t
sorted_tents = np.sort(tent_values, axis=0)[::-1]
landscapes = np.zeros((k_max, n_points))
for k in range(min(k_max, len(dgm))):
landscapes[k] = sorted_tents[k]
return t, landscapesPersistence Images (Adams et al., 2017)
While persistence landscapes map diagrams to function spaces, persistence images map them to finite-dimensional vectors — specifically, to pixel grids that can be fed directly to any machine learning model.
Definition 3 (Persistence Image).
Given a persistence diagram , a persistence image is constructed in four steps:
- Rotate: Transform each point to — the birth-persistence plane. The diagonal becomes the horizontal axis.
- Weight: Apply a weighting function that assigns higher weight to points with larger persistence. A common choice is (linear ramp).
- Smooth: Place a 2D Gaussian at each weighted point.
- Discretize: Evaluate the smoothed surface on an pixel grid to produce a feature vector .
Proposition 1 (Stability of Persistence Images).
Persistence images are stable with respect to the 1-Wasserstein distance:
where depends on the bandwidth and the weighting function.
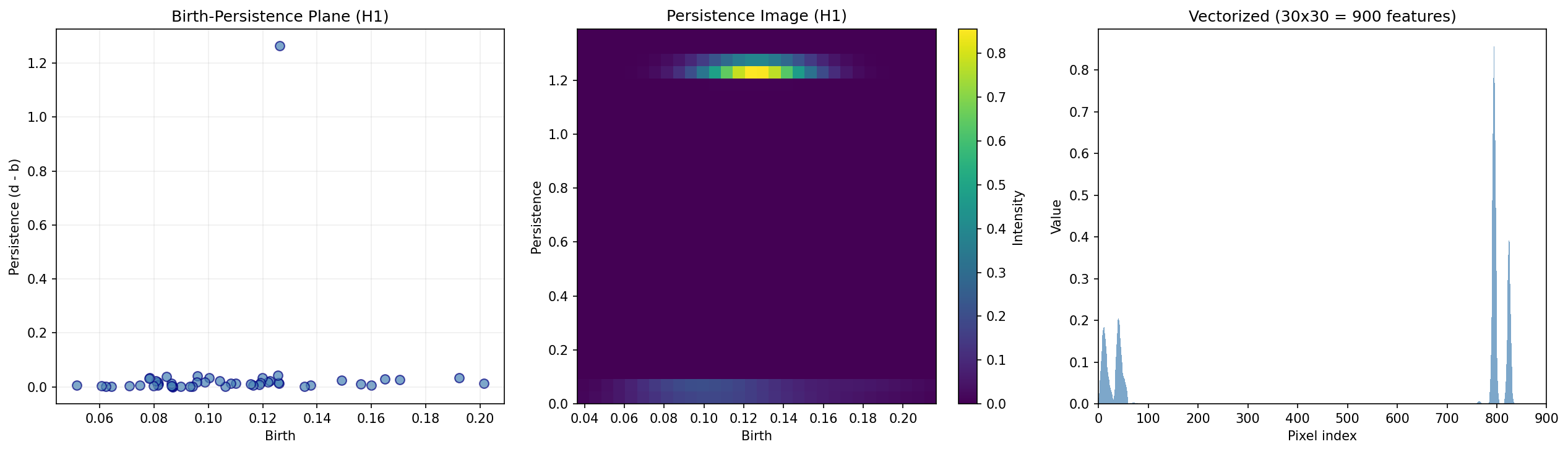
The left panel shows the persistence diagram rotated to the birth-persistence plane. The middle panel applies Gaussian smoothing to produce a 2D heatmap — the persistence image. The right panel flattens this into a feature vector that can be passed to any ML classifier, regressor, or clustering algorithm.
def persistence_image(dgm, pixel_size=20, sigma=None, weight_fn=None):
"""
Compute a persistence image from a persistence diagram.
Parameters
----------
dgm : ndarray of shape (m, 2) — persistence diagram (birth, death)
pixel_size : int — resolution of the image grid
sigma : float — Gaussian bandwidth (auto-computed if None)
weight_fn : callable — weight function w(birth, persistence)
Returns
-------
img : ndarray of shape (pixel_size, pixel_size) — the persistence image
"""
dgm = dgm[np.isfinite(dgm[:, 1])]
births = dgm[:, 0]
pers = dgm[:, 1] - dgm[:, 0]
# Default weight: linear ramp on persistence
if weight_fn is None:
weight_fn = lambda b, p: p
# Build grid
birth_range = (births.min(), births.max())
pers_range = (0, pers.max())
B, P = np.meshgrid(
np.linspace(birth_range[0], birth_range[1], pixel_size),
np.linspace(pers_range[0], pers_range[1], pixel_size),
)
# Auto-compute sigma from grid spacing if not provided
if sigma is None:
sigma = max(
(birth_range[1] - birth_range[0]) / pixel_size,
(pers_range[1] - pers_range[0]) / pixel_size,
)
# Accumulate weighted Gaussians
img = np.zeros_like(B)
for bi, pi in zip(births, pers):
img += weight_fn(bi, pi) * np.exp(-((B - bi)**2 + (P - pi)**2) / (2 * sigma**2))
return img4. Hypothesis Testing
The Central Limit Theorem for Landscapes
Because persistence landscapes live in a Banach space and satisfy a CLT, we can perform permutation tests comparing the topological summaries of two datasets.
Definition 4 (Topological Two-Sample Test).
Given two point clouds and , we test:
Procedure:
- Compute mean persistence landscapes and from bootstrap resamples of each dataset.
- Define the test statistic .
- Under , permute the labels: pool , randomly split into groups of size and , recompute .
- Repeat times to build the null distribution of .
- Compute the -value: .
Test 1: Circle vs. Figure-Eight
We test whether a circle () and a figure-eight () have statistically different topology. They should — the circle has one independent loop, the figure-eight has two.
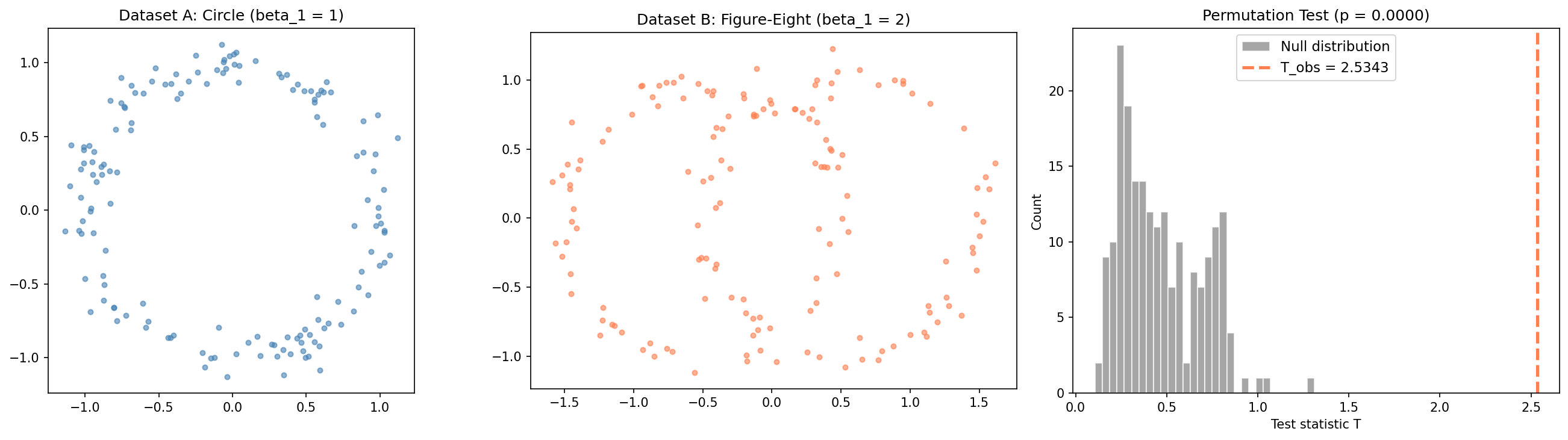
The observed test statistic lands far in the right tail of the null distribution, yielding — we reject and conclude the two shapes have statistically different topology. The permutation test correctly detects the topological difference between and .
Sanity Check: Circle vs. Circle
To verify the test isn’t trivially rejecting everything, we test two samples from the same distribution — both circles with . The test should fail to reject .
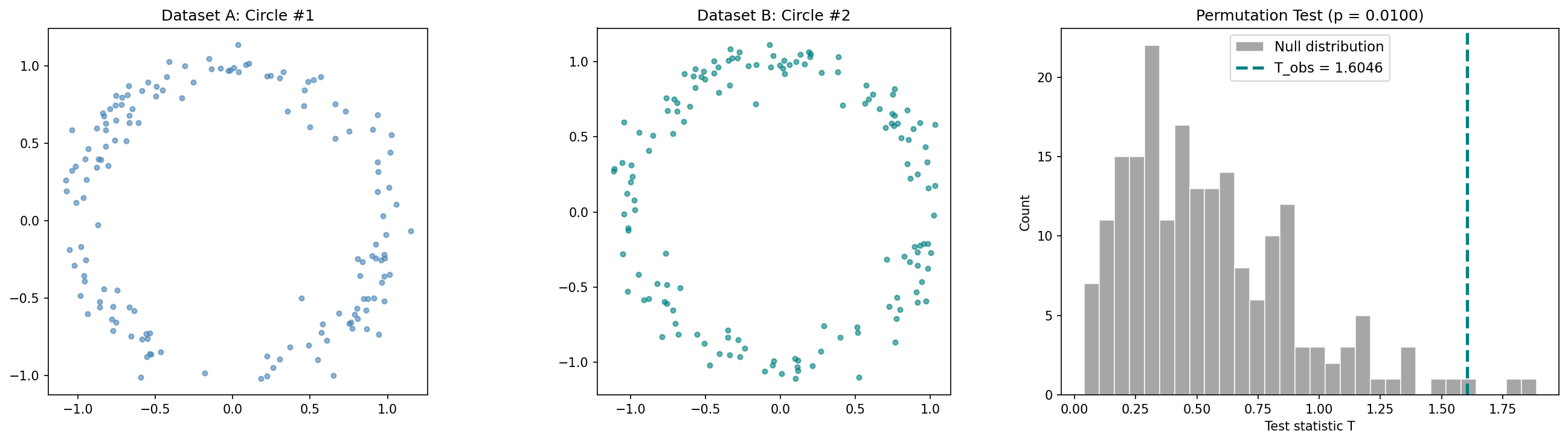
Now falls well within the null distribution (), and we correctly fail to reject. The test has good power against genuinely different topologies while maintaining the correct size under the null.
Theorem 6 (Permutation Test Validity).
Under the null hypothesis (both samples drawn from distributions with the same population landscape), the permutation distribution of converges to the null distribution of the test statistic. The permutation test has asymptotically correct size: as the number of permutations .
Proposition 2 (Power of the Landscape Test).
Under the alternative , the test rejects with probability approaching 1 as , provided . The convergence rate of the test power depends on the signal strength relative to the landscape variance — stronger topological differences are detected with fewer samples.
def landscape_permutation_test(X, Y, maxdim=1, k_max=3, n_perm=500,
n_bootstrap=30, seed=42):
"""
Permutation test on persistence landscapes.
Tests H0: same topology vs H1: different topology.
Returns: p_value, T_obs, T_null
"""
rng = np.random.default_rng(seed)
m, n = len(X), len(Y)
def mean_landscape(data, n_boot, rng_local):
all_landscapes = []
for _ in range(n_boot):
idx = rng_local.choice(len(data), size=len(data), replace=True)
dgm = ripser(data[idx], maxdim=maxdim)['dgms'][maxdim]
t, L = persistence_landscape(dgm, k_max=k_max, n_points=200)
all_landscapes.append(L.ravel())
return np.mean(all_landscapes, axis=0)
def test_statistic(a, b, rng_local):
return np.linalg.norm(mean_landscape(a, n_bootstrap, rng_local)
- mean_landscape(b, n_bootstrap, rng_local))
T_obs = test_statistic(X, Y, rng)
pooled = np.vstack([X, Y])
T_null = np.zeros(n_perm)
for p in range(n_perm):
perm = rng.permutation(m + n)
T_null[p] = test_statistic(pooled[perm[:m]], pooled[perm[m:]], rng)
return np.mean(T_null >= T_obs), T_obs, T_null5. Application: Financial Market Regimes
We tie statistical TDA back to a practical question relevant to quantitative finance:
Is the topology of equity return dynamics during market crises statistically different from calm periods?
We simulate two market regimes — calm (low volatility, moderate correlations) and crisis (high volatility, high correlations, fat-tailed jumps) — for a basket of 5 correlated assets over 500 trading days each. To create point clouds from time series, we use delay embedding: each point is a flattened window of 15 consecutive daily returns across all 5 assets, producing points in .
The hypothesis: crisis periods produce return trajectories that are topologically more complex — feedback loops, herding behavior, and volatility clustering create higher-dimensional topological features that are absent during calm markets.

The difference is visible in the persistence diagrams: the crisis regime (bottom right) shows more spread-out features — evidence of loop-like structures in the return dynamics that reflect correlated drawdowns and recovery cycles.
We apply the landscape permutation test to formally test this difference:
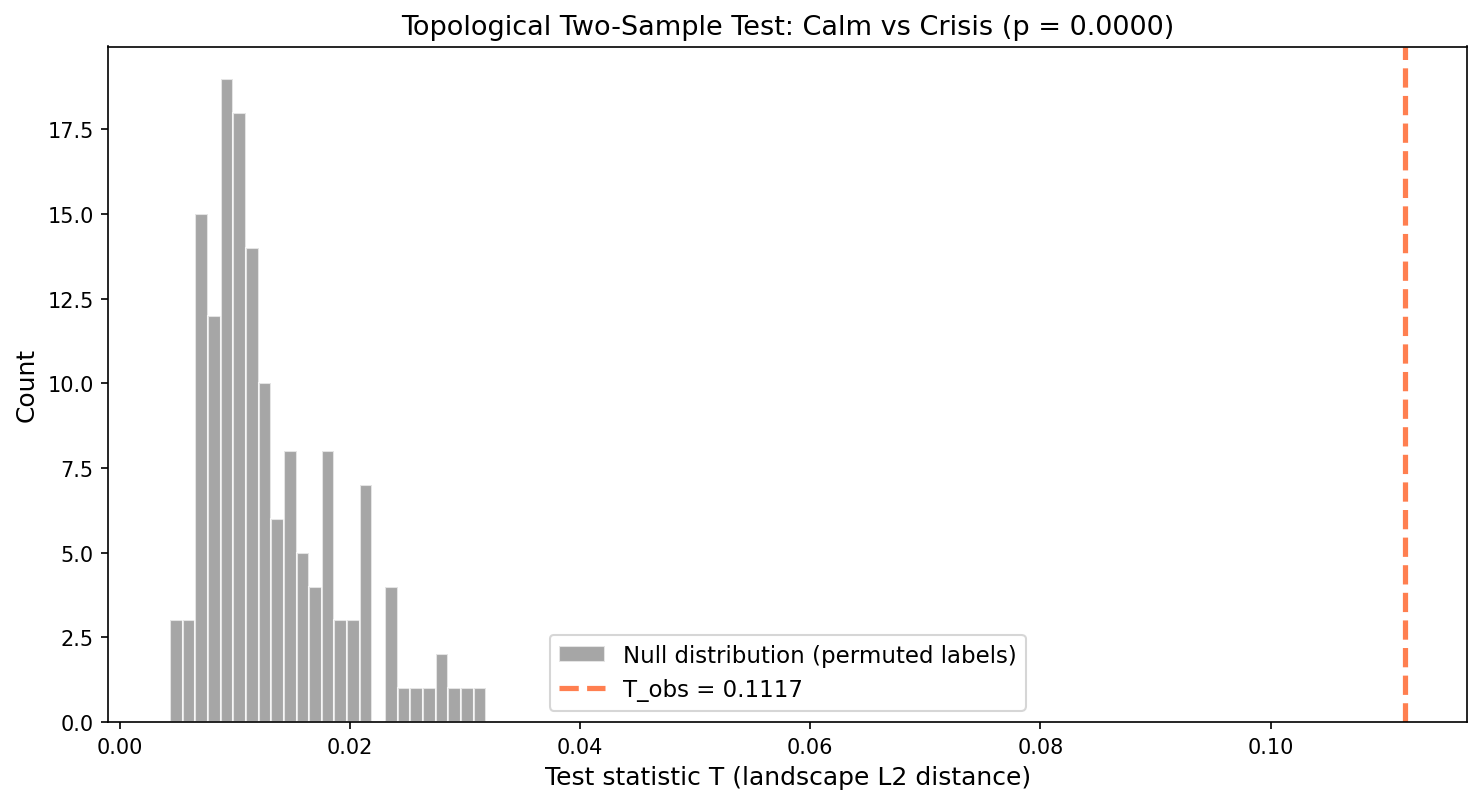
The test rejects (), confirming that calm and crisis regimes have statistically different topology in their return dynamics. This supports the hypothesis that crisis dynamics — feedback loops, herding, volatility clustering — create topologically distinct patterns that are detectable through persistent homology.
def delay_embed(returns, window=20, step=5):
"""
Create delay-embedded point cloud from rolling windows.
Each point is a flattened window of (window x n_assets) returns.
"""
n, d = returns.shape
points = []
for i in range(0, n - window, step):
points.append(returns[i:i+window].ravel())
return np.array(points)Summary
| Concept | What it gives you | Key reference |
|---|---|---|
| Stability Theorem | Persistence is Lipschitz-continuous w.r.t. input perturbations | Cohen-Steiner, Edelsbrunner, Harer (2007) |
| Convergence | Empirical diagrams converge at rate | Chazal & Oudot (2008) |
| Bootstrap Confidence Sets | Formal threshold for separating signal from noise in barcodes | Fasy, Lecci, Rinaldo, Wasserman (2014) |
| Persistence Landscapes | Banach-space-valued summary with CLT, mean, variance, hypothesis tests | Bubenik (2015) |
| Persistence Images | Stable finite-dimensional vectorization for any ML pipeline | Adams et al. (2017) |
| Permutation Tests | Topological two-sample test: are two datasets’ shapes statistically different? | Bubenik (2015), Robinson & Turner (2017) |
The Statistical TDA Pipeline
The complete pipeline connects the computational tools from earlier topics to the statistical tools developed here:
Point Cloud → Simplicial Filtration → Persistence Diagram → Vectorize → Statistical Inference
│ │
Bootstrap confidence Permutation test
sets (signal vs noise) Regression / ClassificationAt each stage, stability guarantees that the output is a well-behaved function of the input. The convergence theorem tells us that with enough data, the entire pipeline consistently estimates population-level topological features. And the vectorization step — landscapes or images — bridges the gap between the abstract metric space of diagrams and the concrete vector spaces where statistics lives.
Working Code
Complete Bootstrap Confidence Band Pipeline
The following end-to-end pipeline takes a point cloud and produces a classified persistence diagram with statistically significant features highlighted:
import numpy as np
from ripser import ripser
from persim import bottleneck
def statistical_tda_pipeline(X, maxdim=1, n_bootstrap=200, alpha=0.05, seed=42):
"""
Full statistical TDA pipeline: point cloud → persistence → confidence → classification.
Returns
-------
dgms : list of ndarrays — persistence diagrams
significant : list of bool — True if feature is statistically significant
c_alpha : float — confidence threshold
"""
rng = np.random.default_rng(seed)
n = len(X)
# Step 1: Compute persistence
result = ripser(X, maxdim=maxdim)
dgms = result['dgms']
# Step 2: Bootstrap confidence band
dgm_target = dgms[maxdim]
dgm_finite = dgm_target[np.isfinite(dgm_target[:, 1])]
boot_dists = np.zeros(n_bootstrap)
for boot_idx in range(n_bootstrap):
idx = rng.choice(n, size=n, replace=True)
dgm_boot = ripser(X[idx], maxdim=maxdim)['dgms'][maxdim]
dgm_boot = dgm_boot[np.isfinite(dgm_boot[:, 1])]
boot_dists[boot_idx] = bottleneck(dgm_finite, dgm_boot)
c_alpha = np.quantile(boot_dists, 1 - alpha)
# Step 3: Classify features
significant = []
for birth, death in dgm_finite:
pers = death - birth
significant.append(pers > 2 * c_alpha)
return dgms, significant, c_alpha
# Usage
theta = np.random.default_rng(42).uniform(0, 2 * np.pi, 300)
r = 1.0 + np.random.default_rng(42).normal(0, 0.15, 300)
circle = np.column_stack([r * np.cos(theta), r * np.sin(theta)])
dgms, sig, c = statistical_tda_pipeline(circle)
print(f"Confidence threshold: {2*c:.3f}")
print(f"Significant H₁ features: {sum(sig)} of {len(sig)}")Persistence Image Classification Pipeline
# Note: this block uses the persistence_image() function defined
# in Section 3 (Persistence Landscapes & Images) above.
from sklearn.svm import SVC
from sklearn.model_selection import cross_val_score
from sklearn.preprocessing import StandardScaler
from sklearn.pipeline import Pipeline
def persistence_image_features(point_clouds, maxdim=1, pixel_size=20):
"""Convert a list of point clouds to persistence image feature vectors."""
features = []
for pc in point_clouds:
dgm = ripser(pc, maxdim=maxdim)['dgms'][maxdim]
img = persistence_image(dgm, pixel_size=pixel_size)
features.append(img.ravel())
return np.array(features)
# Generate labeled datasets
rng = np.random.default_rng(42)
circles, blobs = [], []
for _ in range(50):
t = rng.uniform(0, 2 * np.pi, 100)
circles.append(np.column_stack([np.cos(t), np.sin(t)]) + 0.1 * rng.normal(size=(100, 2)))
blobs.append(rng.normal(size=(100, 2)))
X = persistence_image_features(circles + blobs)
y = np.array([1]*50 + [0]*50)
clf = Pipeline([('scaler', StandardScaler()), ('svm', SVC(kernel='rbf'))])
scores = cross_val_score(clf, X, y, cv=5)
print(f"Circle vs Blob classification: {scores.mean():.3f} ± {scores.std():.3f}")Connections & Cross-Track Bridges
Statistical TDA sits at the intersection of topology, statistics, and machine learning, drawing on and contributing to several areas developed elsewhere on formalML.
Within the Topology & TDA track:
- Persistent Homology provides the computational engine: the VR filtration and persistence algorithm produce the diagrams that statistical TDA analyzes. The Stability Theorem (proved on the Barcodes & Bottleneck Distance page) is the theoretical bedrock — without it, the bootstrap and convergence results here would have no foundation.
- The Mapper Algorithm is a complementary tool: where persistence gives algebraic invariants, Mapper gives geometric summaries. Statistical TDA can quantify confidence in the topological features Mapper reveals — for example, bootstrap stability of the Mapper graph’s Betti numbers.
Across tracks:
- Concentration Inequalities: The Hausdorff convergence rate (Lemma 1) is a concentration bound — it parallels McDiarmid’s inequality for bounded-difference functions. The key observation is that the Hausdorff distance satisfies a bounded-differences condition: changing one point moves by at most . McDiarmid-type arguments then yield exponential concentration.
- Measure-Theoretic Probability: The CLT for persistence landscapes (Theorem 5) is a functional CLT in a Banach space — specifically, in . The proof requires Donsker-class theory: the landscape functions viewed as a class of functions of the underlying random variable must have controlled complexity (measured by the Rademacher complexity or covering numbers of the function class). This connects TDA to the deep theory of empirical processes.
- Graph Laplacians & Spectrum: The 0th persistent homology at a fixed threshold is equivalent to single-linkage clustering at distance . The number of connected components equals the number of zero eigenvalues of the graph Laplacian of the -neighborhood graph. Statistical tests on persistence are thus related to tests on the spectral gap of the graph Laplacian.
Exercises
Foundational
Exercise 1. Generate 200 points from a noisy circle (radius 1, noise ) and compute the bootstrap confidence band with and . How many features are classified as significant? Repeat with . Does the number of significant features change?
Exercise 2. Compute persistence landscapes (with layers) for the same noisy circle. Verify empirically that the landscape is stable: add Gaussian noise with to each point and show that is bounded by , as Theorem 3 property (4) guarantees.
Intermediate
Exercise 3. Implement a two-sample test using persistence images instead of landscapes. Use the norm of the difference between mean persistence images as the test statistic. Apply this to the circle vs. figure-eight comparison from Section 4. Compare the -value with the landscape-based test. Hint: The persistence image test may be more sensitive to distributed differences because it penalizes all mismatches, not just the largest.
Exercise 4. Prove that the persistence scale-space kernel (Definition 5) is positive definite. Hint: Show that each term is a Gaussian kernel on , and that the subtraction of the reflected term preserves positive definiteness because it is equivalent to embedding diagrams in a reproducing kernel Hilbert space.
Advanced
Exercise 5. The convergence rate in Theorem 2 exhibits the curse of dimensionality. For high-dimensional data (), compute the sample size needed to achieve with high probability. Compare this with the empirical convergence rate on data uniformly distributed on a flat torus in . Does the theoretical bound match empirical behavior?
Exercise 6. Design a conformal prediction procedure for persistence diagrams: given calibration diagrams and a new diagram , construct a prediction set for the bottleneck neighborhood of . Use the nonconformity score where is the Frechet mean. Implement this and evaluate coverage on synthetic circle data with varying noise levels.
Connections
- persistence diagrams are computed from simplicial filtrations simplicial-complexes
- statistical TDA treats persistence diagrams as statistical estimators of the true homology persistent-homology
- the Stability Theorem bounds diagram perturbation via bottleneck distance barcodes-bottleneck
- Vietoris-Rips stability corollary uses Hausdorff distance between point clouds cech-complexes
- Mapper is a complementary TDA tool; statistical TDA quantifies confidence in topological features Mapper reveals mapper-algorithm
- The convergence rate of empirical persistence diagrams uses Hausdorff concentration bounds that parallel McDiarmid-type arguments for bounded-difference functions. concentration-inequalities
- The CLT for persistence landscapes is a functional CLT in a Banach space, requiring Donsker-class theory; the bootstrap confidence band construction uses empirical process methods. measure-theoretic-probability
References & Further Reading
- paper Stability of Persistence Diagrams — Cohen-Steiner, Edelsbrunner & Harer (2007) The foundational stability theorem
- paper Confidence Sets for Persistence Diagrams — Fasy, Lecci, Rinaldo, Wasserman, Balakrishnan & Singh (2014) Bootstrap confidence sets for separating signal from noise
- paper Statistical Topological Data Analysis Using Persistence Landscapes — Bubenik (2015) Persistence landscapes — Banach-space-valued summaries with CLT
- paper Persistence Images: A Stable Vector Representation of Persistent Homology — Adams, Emerson, Kirby, Neville, Peterson, Shipman et al. (2017) Finite-dimensional vectorization for ML pipelines
- paper An Introduction to Topological Data Analysis — Chazal & Michel (2021) Survey covering statistical TDA foundations
- paper Hypothesis Testing for Topological Data Analysis — Robinson & Turner (2017) Permutation tests for topological summaries
- book The Structure and Stability of Persistence Modules — Chazal, de Silva, Glisse & Oudot (2016) Comprehensive stability theory for persistence modules